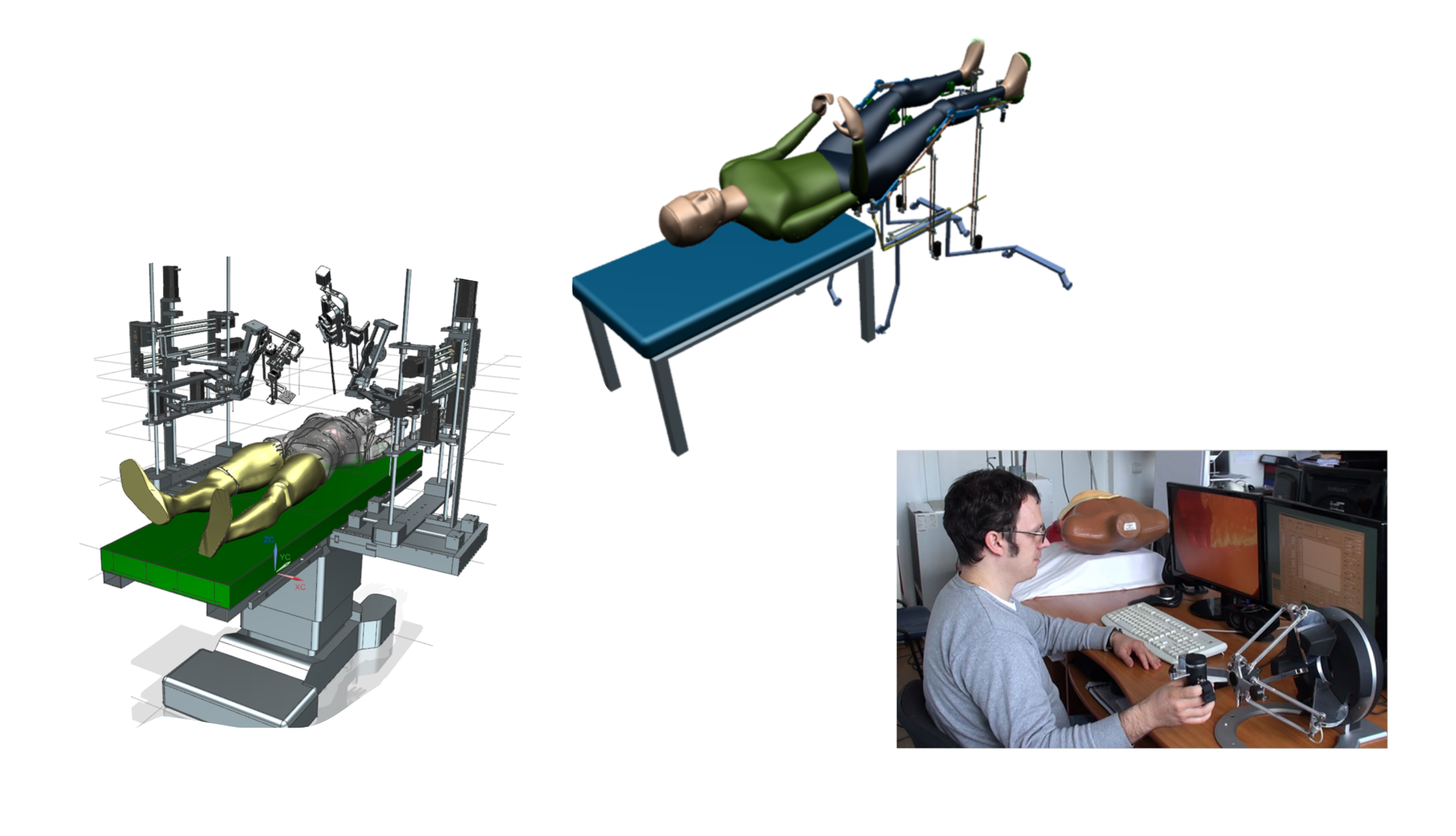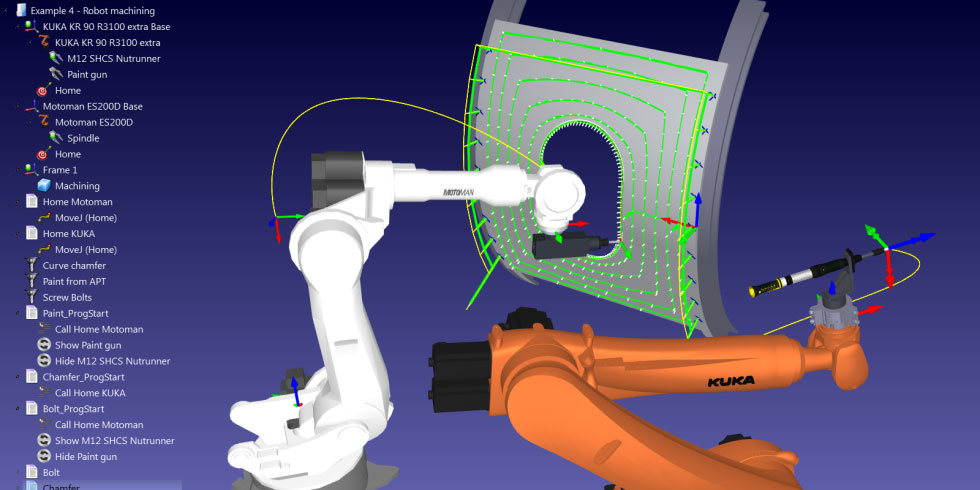
- Modeling and simulation of parallel robots (for medical and industrial applications)
- Data analysis and computer graphics
- Mathematical modeling of robot kinematics, dynamics and workspace
- Finite element analysis (FEM) of robotic components
- Simulation systems for different robotic applications.
- Precise measurements using sensor systems (tracking sensors, optic, inductive etc.)