NeuroAssist
|
Home |Partners |Objectives |Achievements |Publications |Events |Login Data Base |Contact |

Project coordonated by Technical University of Cluj-Napoca
Project director: Prof. Dr. Ing. Doina PISLA
Experimental demonstration project (PED) financed by the Executive Unit for Financing Higher Education, Research, Development and Innovation(UEFISCDI)
Project code: PN-III-P2-2.1-PED2019-3022, Duration: 2020-2022
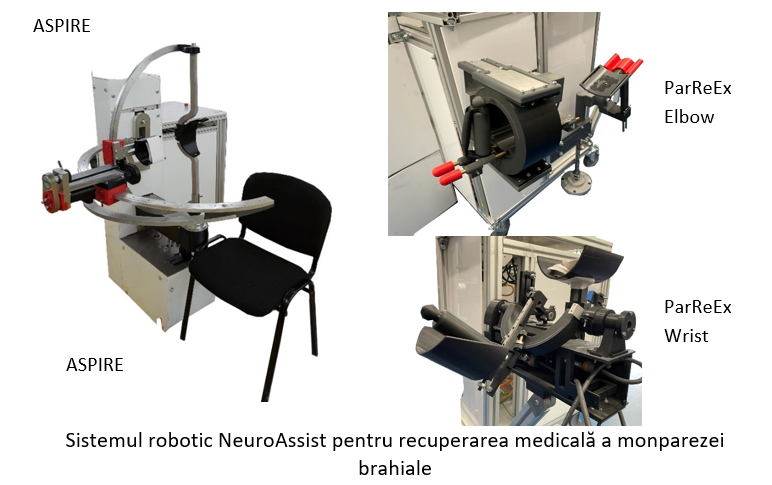
The NeuroAssist robotic system was designed for the recovery of the upper limb of patients suffering from brachial monoparesis. The robotic system consists of three robotic modules: the first module is for the recovery of flexion, extension, adduction and abduction movements at the level of the shoulder joint (ASPIRE), the second module is for the recovery of extension/flexion movements at the level of the elbow joint and pronation/supination at the level of the forearm (ParReEx Elbow), and the third module is for the recovery of movements of flexion, extension, pronation and supination at the level of the wrist (ParReEx Wrist).
The three robotic modules are integrated into a single system, benefiting from a unified command and control system that allows the management of up to 3 patients at the same time and can be supervised by a single operator.
The robotic system benefits from four working modes: passive (when the patient cannot perform the movement at all and it is performed entirely by the robot), assistive (when the movement is performed by the patient, and the robot only assists the movement by keeping in balance of the weight of its own elements), active-assistive (when movement is initiated by the patient and the robot intervenes only when he can no longer perform the movement) and resistive (when the robot applies a reaction to the force exerted by the patient-also called the mode of training). The robotic system is equipped with a decision algorithm based on the continuous monitoring of the forces in the mechanisms and the patient's vital signs to identify possible events that may occur during the medical recovery session.