
ROBOCORE - Robotic assisted prostate biopsy,
a high accuracy innovative method
Main Objectives:
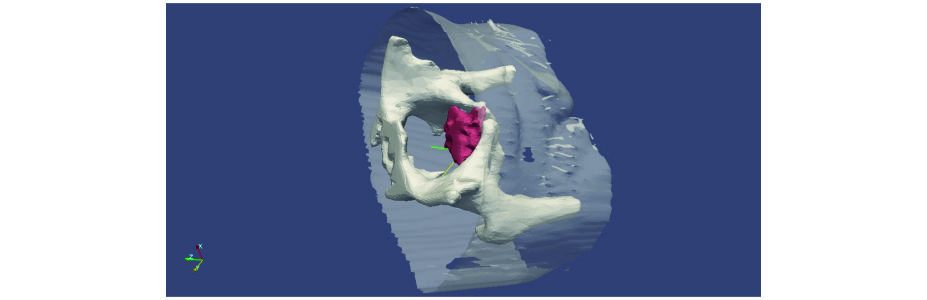
- Developing a new robotic system capable to complete a high accuracy biopsy of the prostate, based on a points system relatively defined by geometric data of the prostate volume.
- Developing a new software application to simulate robotic biopsy of the prostate in a virtual reality environment.
Specific Objectives :
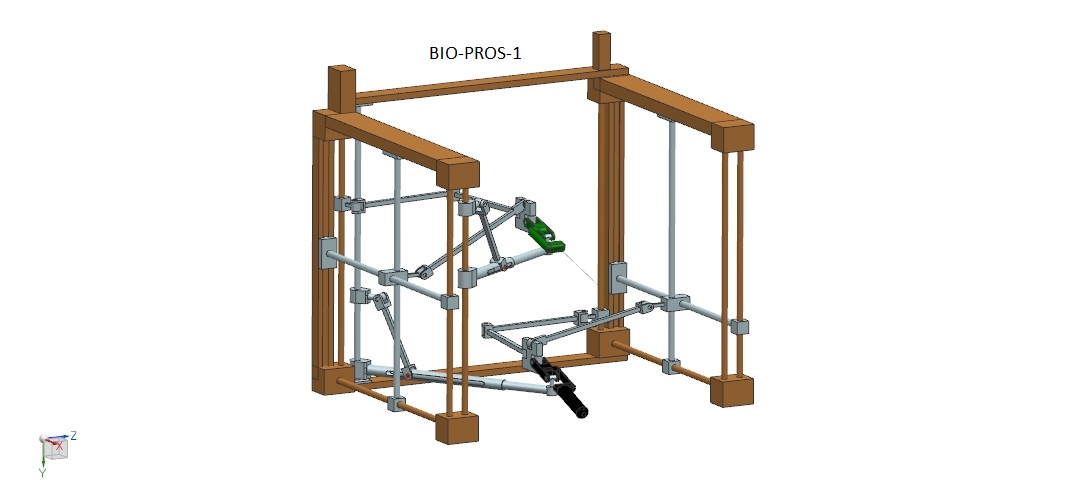
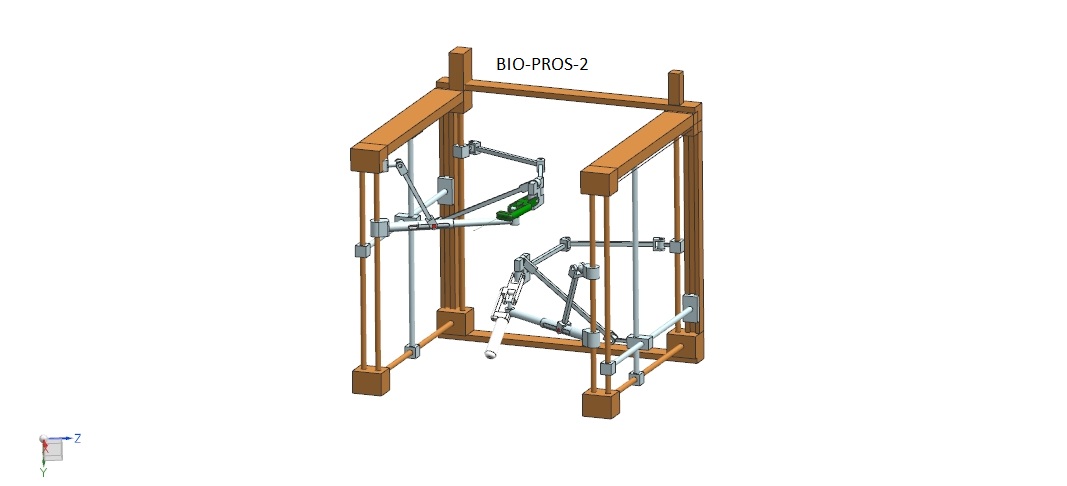
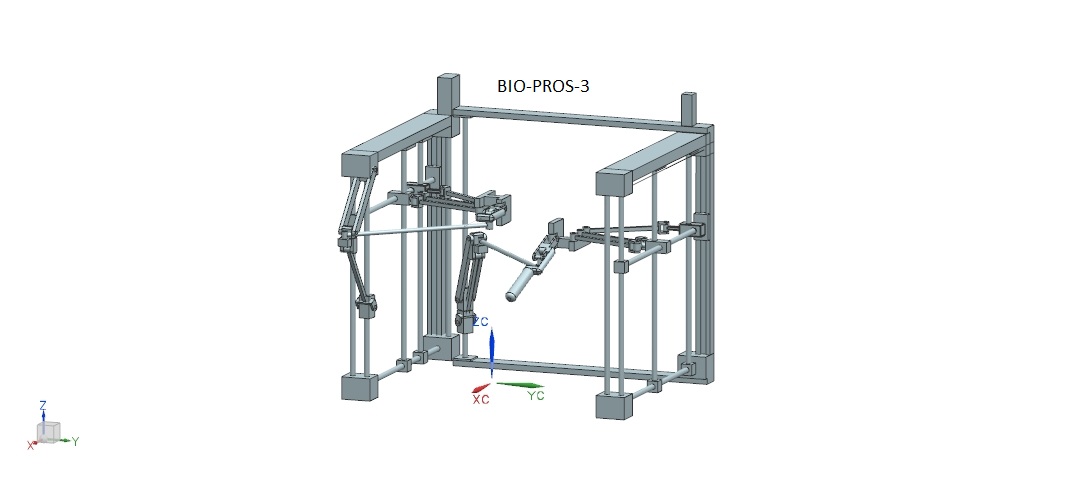
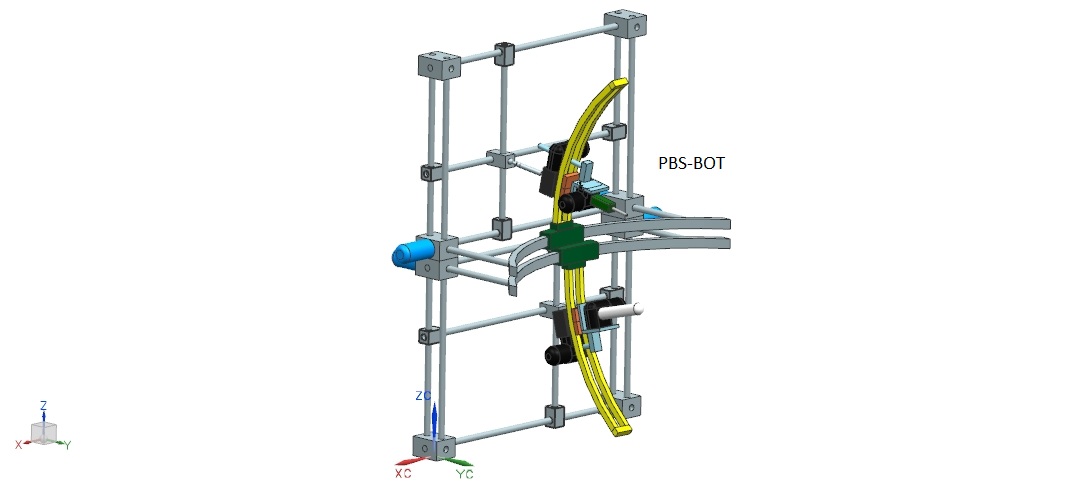
- Systematic development of an advanced robotic system capable to simultaneously handle the TRUS probe and the biopsy gun. Geometric and kinematic modeling of the proposed solution.
- Development of an advanced virtual reality software to simulate robotic biopsy procedure.
- Designing and building an experimental model of the robotic prostate biopsy system.
- Development of a control and actuating system for the robotic structure.
- Development of a system for generating optimal trajectories for biopsy based on the virtual reality software.
- Creating a TEST program to validate the functionality of the experimental model.
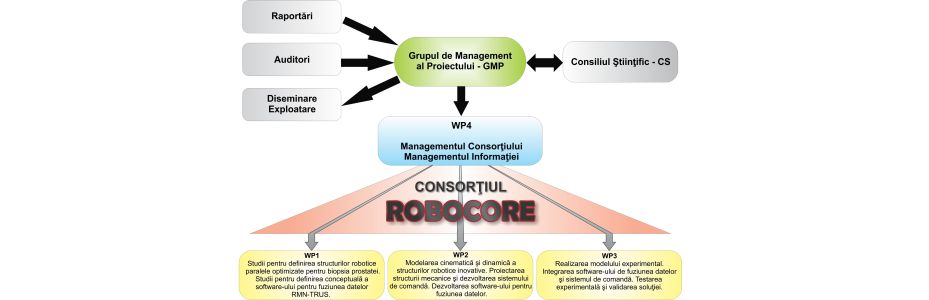
- Increase the acknowledgment of the consortium at National and European level. Integration of the consortium in international research projects, scientific collaborations and accession at international technology alliances.