

ACCURATE: A multi-purpose needle insertion device
for the diagnosis and treatment of cancer
ACTIVITY REPORT, FINAL - 2017
The development of the ACCURATE project " A multi-purpose Needle Insertion device for the diagnosis and treatment of cancer" started the activities of the ACCURATE modules (mechanical and software) for the diagnosis and treatment of cancer through biopsy, brachytherapy and radiofrequency ablation, based on analyses of the world-wide solutions and medical requirements for each procedure. The solutions developed within the ACCURATE project have features such as positioning of specific needles, their ease of use and rigidity (the modules do not introduce unwanted movements). In addition to the mechanical development of the ACCURATE system, software elements have been developed and deployed in the control systems of two medical robots (BIO-PROS 1 and PARA-BRACHYROB developed within CESTER) used for testing the modules. Medical protocols have been created to establish the functionality of the ACCURATE modules in the medical environment and a series of experiments with healthcare professionals have been conducted to test, optimize and validate the modules. During the project, the engineering team organized several visits to the Third Surgery Clinic of the Regional Institute of Gastroenterology and Hepatology "Prof. Dr. Octavian Fodor ",Cluj-Napoca, where CESTER team assisted in performing biopsy and radiofrequency ablation procedures in the liver. The team of doctors from the Surgery Clinic III visited the CESTER research centre to assist with the ACCURATE system experiments and to provide feedback on module development..
ACTIVITY REPORT, STAGE 2 - 2016
“Development of constructive solutions for the family for: innovative needle placement devices, external mounting module and the control system. Experimental ACCURATE module development.”
The second stage of the ACCURATE project entitled “External module development for mounting the ACCURATE system on an existent robotic system. The development of the mechanical structure, command system for each needle insertion module. Experimental module realization.” continued with activities towards the realization of the ACCURATE system for cancer diagnosis and treatment. An mathematical model was determined for the needle insertion and tissue resistance, which was further implemented into a numerical algorithm. Based on the medical procedure and on existing medical robotic systems three needle insertion modules and an external mounting module were developed and validated (functional wise) by medical experts. To determine and achieve a modular command system, an analysis was conducted on the functionality of each module, that lead to the definition of a control system capable to control all the three modules individually. A numerical algorithm for force feedback was also implemented into the control system to achieve an increased safety factor for the tissue penetration. After a careful analysis of the three needle modules, the material was chosen and the components execution and purchasing was partially done. The mechanical assembly and electronic components mounting was also partially achieved. Based on the medical procedure, and on the current state of the art of the project, experimental tests were defined and planed for the ACCURATE system validation.
ACTIVITY REPORT, STAGE 1 - 2015
“Development of conceptual solutions for the family of innovative needle placement devices.”
The first stage of the ACCURATE project “Development of conceptual solutions for the family of innovative needle insertion devices” has started the development of the ACCURATE modules for the diagnosis and treatment of cancer through biopsy, brachytherapy and radiofrequency ablation. A thorough analysis of the state-of-the-art in such systems, has emphasized the need of development of advanced systems which would enable the achievement of positioning accuracies of the medical devise at higher values than the existing ones in order to improve the medical task and to improve the oncologic prognosis. The critical analysis of the current achievements and concerns underline the fact that the objectives of ACCURATE are among the worldwide topics of interest committing to provide innovative contributions in the field of medical robotics in oncology. The critical functionalities of the ACCURATE modules were identified and prioritized through competitive engineering tools (AHP) to identify the technical characteristics that have to be included in the ACCURATE modules. A number of conceptual modules were developed covering all the three procedures: biopsy, brachytherapy and radiofrequency ablation aiming also their integration on existing robotic structures. Several visits were made at the Surgical Clinic III, within the Regional Gastroenterology and Hepatology Institute “Prof. dr. Octavian Fodor” Cluj-Napoca where the team of engineers assisted to several medical procedures for biopsies and radiofrequency ablation for the liver. A protocol for robotic brachytherapy was defined to describe separately the motions of the robotic system and the needle insertion device in such way that during the next project phase work will start on the constructive development of the first ACCURATE module for brachytherapy.
Achievements:
• Developmnent of a adaptive force feedback algorithm
for the tissue penetration;
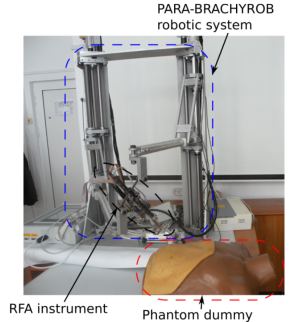
• Design of an external mounting module to connect the ACCURATE system
an an existing medical robot;
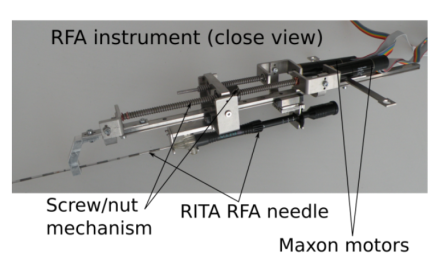
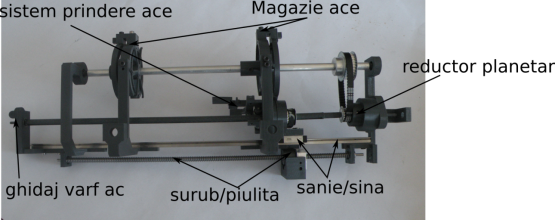
• Development of the mechanical structures for the three needle insertion
modules: biopsy,
ablation,
brachitherapy;
• Control system that integrates the force feedback algorithm;
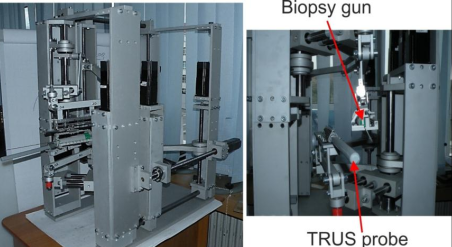
• Experimental module for the biopsy, ablation and brachytherapy modules
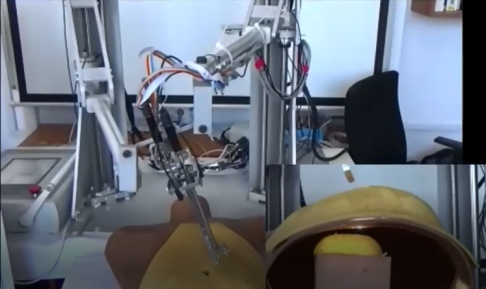
• The integration of the ACCURATE system into existing robotic structures
• Experimental test with the needle insertion modules to reveal the viability for the medical procedure
• The optimization of the ACCURATE system
• Medical protocols for the ACCURATE system
{kind=link}
{kind=link}
{kind=link}