OnTarget
|
Home |Parteneri |Obiective |Realizari |Publicatii |Manifestari |Login Baza de Date |Contact |
 />
/>
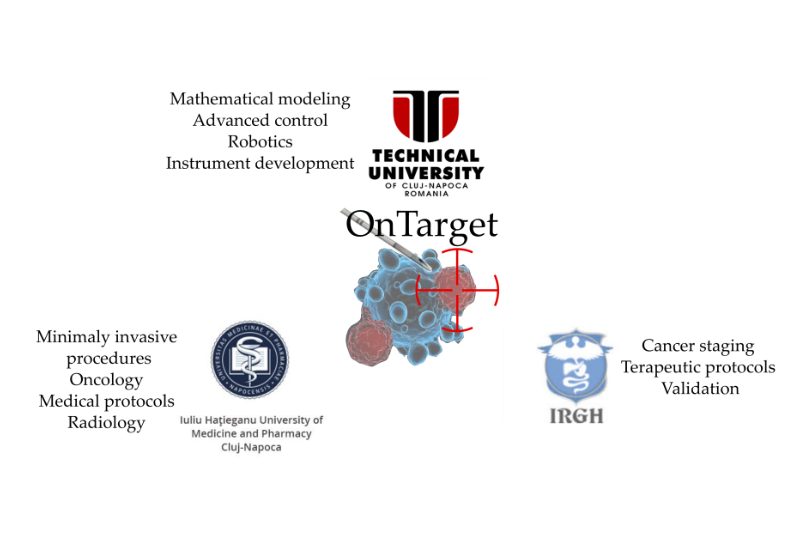
Proiect coordonat de Universitatea Tehnica din Cluj-Napoca
Director proiect: Prof. Dr. Ing. Calin VAIDA
Proiect experimental demonstrativ (PED) finantat de Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si Inovarii (UEFISCDI)
Cod proiect: PN-III-P2-2.1-PED2019-4375, Durata proiectului: 2020-2022.
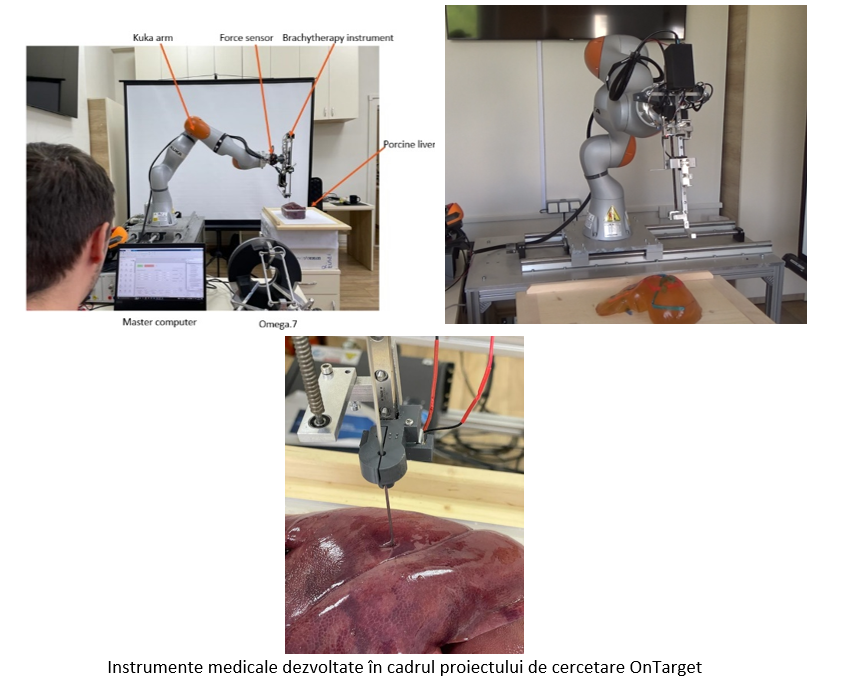
Instrumentele medicale din cadrul proiectului OnTarget au fost concepute pentru realizarea procedurilor de ablație cu radiofrecvență și brahiterapie pentru pacienții care prezintă tumori maligne neoperabile la nivelul toracelui sau abdomenului. Cele două instrumente medicale pot fi atașate pe flanșa a mai multor sisteme robotice prin intermediul unui adaptor de flanșă. Pentru operarea instrumentelor medicale a fost dezvoltat un sistem de control special adaptabil, capabil să monitorizeze forțele din sistem în timp real și în același timp să preconizeze deflecția acului pe măsură ce acesta este inserat în funcție de forțele înregistrate.
Instrumentul de radio-ablație este prevăzut cu un modul de inserție a acului și un altul de extindere/retragere electrozi. Ghidarea instrumentului se face cu ajutorul sistemului robotic (Kuka iiwa sau PARA-BRACHYROB)iar după atingerea punctului de inserție a acului instrumentul de ablație preia controlul procedurii și cu ajutorul operatorului introduce acul de ablația cât mai precis.
Instrumentul de brahiterapie este prevăzut cu un modul de inserție acului de brahiterapie, o magazie care poate conține până la șase ace, un sistem de încărcare al acelor și un sistem de ghidarea și eliberarea a acelor. Funcționarea instrumentului este asemănătoare cu cea a instrumentului de ablație, diferența fiind făcută de faptul că acul de brahiterapie nu mai este extras de către instrument, aceasta este eliberat în organul țintit, instrumentul poate insera până la șase ace printr-o singură încărcare, iar după inserția acelor, stiletele acestora sunt extrase tot de către sistemul robotic cu ajutorul sistemului de ghidarea a acului, canulele rămase în organul țintit sunt conectate la aparatul de dozimetrie iar după finalizarea procedurii medicale aceste sunt extrase manual de către chirurg.